6.1. OpenCL Basics#
OpenCL, which stands for Open Computing Language, is an industrial standard to support cross-platform parallel programming in computing systems with hetergeneous compute resources, such as CPUs, GPUs, FPGAs, dsps, and TPUs
6.1.1. Platform Model#
The OpenCL platform model describes how the compute resources in a system are topologically connected. The OpenCL platform model is shown in the following figure:
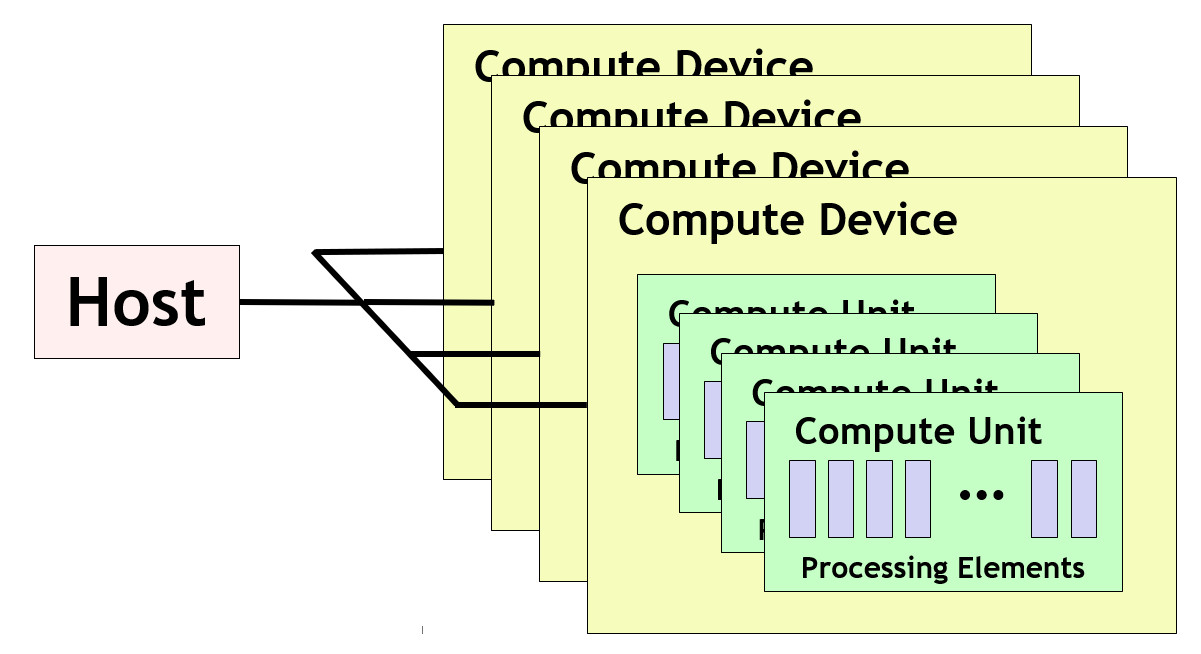
A host (usually a CPU) is connected to one or more compute devices (CPUs, GPUs, FPGAs, dsps, TPUs), each of which is in a collection of one or more compute units. Each compute unit may in turn consists of one or more processing elements.
The host controls the compute devices whose compute units may perform computing tasks in parallel.
Correspondingly in our case, we may regard the XCZU48DR RFSoC device as our platform, in which the ARM Cortex-A53 APU is the host and the PL is a compute device. The DSP kernels in the PL are compute units, each of which is composed of the tasks in the data flow graph that defines the kernel serving as processing elements.
OpenCL provides a programming framework for us to develop programs that run on the host as well as the compute devices. In particular, the OpenCL framework contains three layers of APIs:
The platform-layer APIs support an application program that runs on the host to discover the platform architecture, and to set up, configure, and initialize the compute devices in the platform.
The kernel compiler generates kernel programs that run on the compute devices.
The runtime APIs support the application program that runs on the host to transfer kernel programs and data to the compute units in the compute devices, execute the kernel programs to perform computing tasks in the compute units, and transfer results back from the compute devices back to the host.
As discussed in Section 1.3, we will use Vitis HLS to develop kernel programs in C/C++. Thus, we will not use the kernel compiler that supports that purpose. However, we will use both the platform-layer and runtime APIs in the host program to set up the OpenCL platform, control the DSP kernels, and execute the DSP computing task in the kernels.
{kind=link}
6.1.2. Memory Model#
The OpenCL memory model describes how different memory resources in the system are connected to the various components in the OpenCl platform. The OpenCL memory model is shown in the following figure:
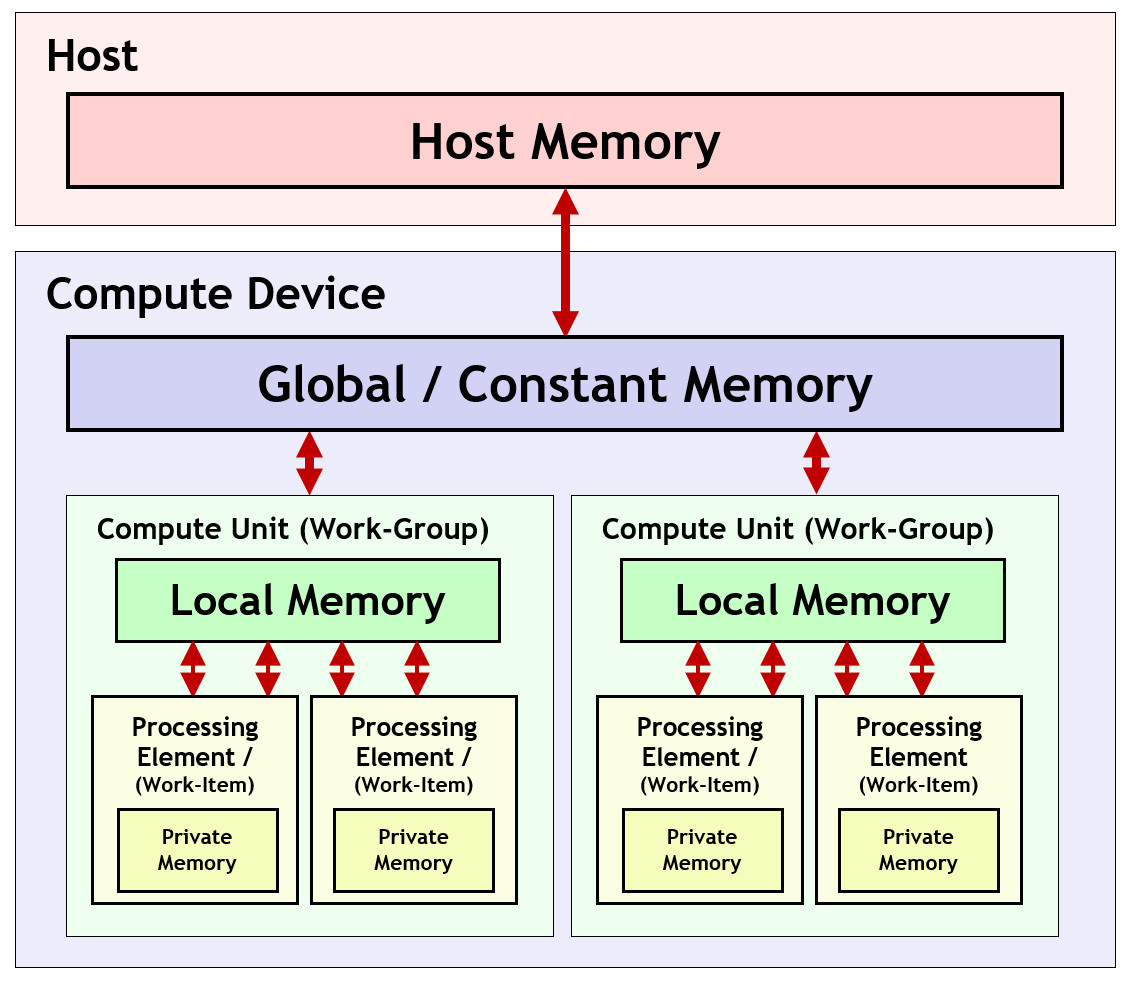
Host memory: accessible only to the host
Global memory: accessible to all compute units in a compute device
Local memory: available only within in a compute unit
Private memory: available only to a single processing element
Again, mapping this memory model back to our case (see Section 1.1):
The DDR4 bank connected to the PS is the host memory.
The DDR4 bank connected to the PS is the global memory (in our platform setting).
Local memory includes all memory resources within a DSP kernel generated for global variables, variables in the top-level function, and streaming buffers.
Private memory includes all memory resources generated within a task function.
Memory management in OpenCL is explicit. That is, the host application program and kernel programs must explicitly moves data between the different types of memory types above. In particular, the host program is expected to employ the OpenCL runtime APIs to move data between the host and global memory to implement data transfer between the host and a compute device.
{kind=link}
6.1.3. Execution Model#
The OpenCL execution model describes how computing tasks are executed in the different compute devices in the OpenCl platform. The typial OpenCL execution model is shown in the following figure:
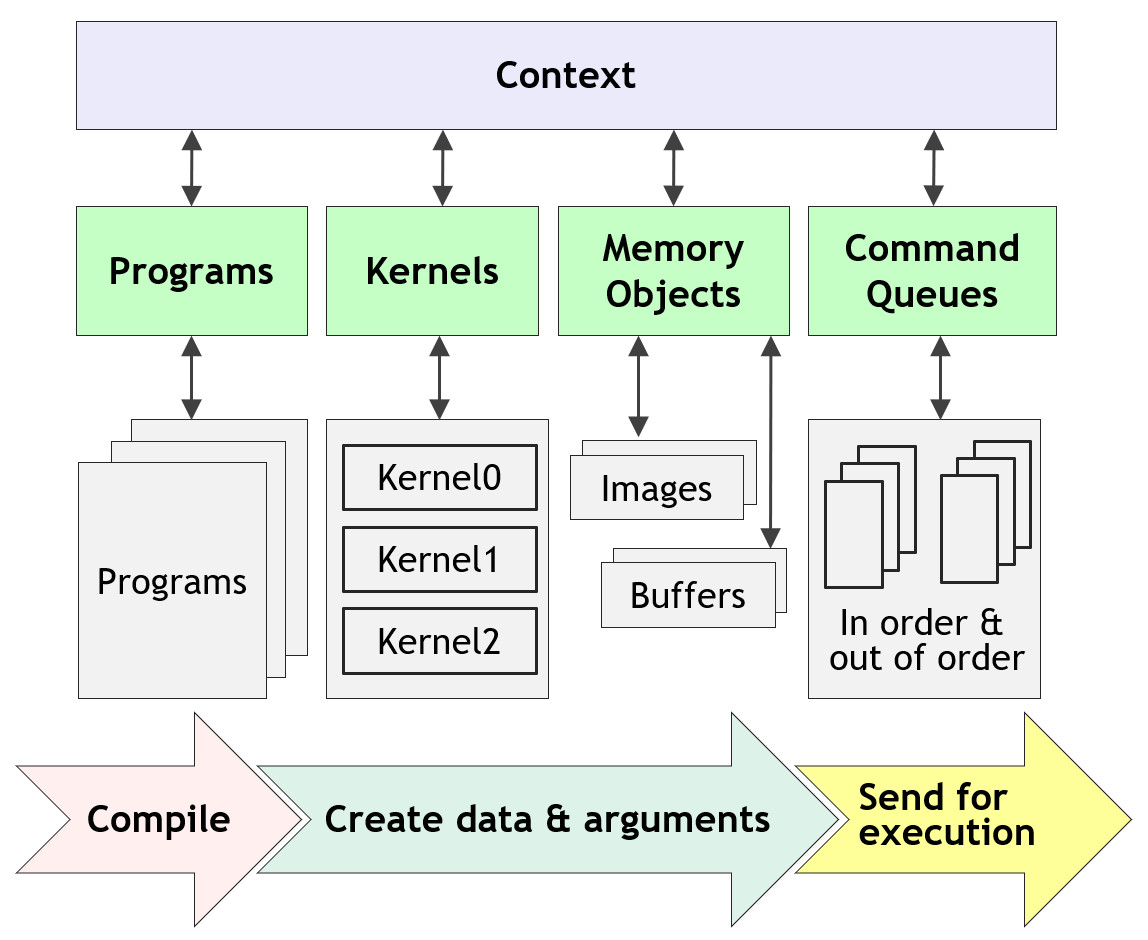
To execute computing tasks in a platform, we must first create a context, which includes a set of compute devices, the memory objects accessible to those compute devices, and one or more command queues that are used to schedule execution of kernel programs and operations on memory objects. In essence, the context is an environment within which the kernel programs execute and memory management and synchronization are performed.
A kernel program executes on a compute device. This corresponds to the kernel code of our DSP kernel. Multiple instances of the same kernel program can be implemented in the PL forming individual compute units. We will slightly carelessly use the term kernel to refer to both the kernel code and the compute unit that is implemented in the PL. An OpenCL program is a collection of kernels. A memory object is a handle to a region of the global memory.
A command queue holds commands that will be executed on a specific compute device. The host places commands into the command queue to schedule their execution. There are three types of commands:
A kernel execution command executes a kernel on a compute unit of a compute device.
A memory command transfers data to, from, or between memory objects, or map and unmap memory objects from the host’s address space.
A synchronization command constrains the order of execution of commands.
Commands in the command queue can be executed in two modes:
In-order execution: The commands are executed in the order that they are placed into the command queue. A command must complete before the next one begins.
Out-of-order execution: Commands are launched in order, but a command can execute without waiting for completion of prior commands. Specific ordering constraints on the execution of commands can be enforced by explicitly issuing synchronization commands.
{kind=link}