4.3. Arrays#
Vitis HLS implements arrays (except for array arguments of the top-level function) as some type of memory during synthesis. The types of memory supported include, RAM (
RAM_1P,RAM_1WNR,RAM_2P,RAM_S2P,RAM_T2P), ROM (ROM_1P,ROM_2P,ROM_NP), and shift registers (FIFO). More detailed descriptions about these different types of memory can be found from the manual of#pragma HLS bind_storage. Each of these types of memory can be implemented using different PL resources, such as block RAM, URAM, and CLBs.Tip
Since arrays are synthesized as memory, they can only be instantiated in the C/C++ code with sizes known during synthesis.
By default, Vitis HLS automatically decides the type of memory to synthesize an array into as well as the suitable PL resource to implement the selected type of memory. For example, if the Vitis HLS infers that an array is either read or written only once per iteration in a loop, then it synthesizes the array as a single-port RAM (
RAM_1P), and if the array size is small, the single-port RAM will be implemented using CLBs in the PL. We may override the implementation choice of Vitis HLS by using the bind-storage pragma.Array arguments of the top-level function in a DSP kernel are mapped according to Table 4.1 and will be discussed in Section 5.
4.3.1. Array Access Performance#
Let us revsist the simple loop-unrolling example in Section 4.2.2:
int acc = 0; int x[10]; Loop: for (int n=0; n<10; n++) { #pragma HLS unroll acc += x[n]; }
Vitis HLS synthesizes the array
xinto a two-port RAM. Since only two reads from the RAM can be made in each clock cycle, it takes 5 clock cycles to read the 10 elements inxeven thoughLoopis unrolled into a binary adder tree that can perform the accumulation of the 10 elements in just a single clock cycle. Indeed, reading from the arrayxis in fact the bottleneck of performance in this case.Vitis HLS provides two optimizations to solve array access bottleneck problems similar to the one in the example above:
- Array Partitioning#
An array is partitioned into smaller arrays or individual elements, effectively increasing the number of read and write ports to the original array.
- Array Reshaping#
Multiple elements in an array are concatenated to a single element with an increased bit-width, allowing more elements in the original array to be accessed in a single clock cycle.
4.3.1.1. Array Partitioning#
An array can be partitioned by using
#pragma HLS array_parition.There are three types of ways to partition an array that can be specified by the
type=option in the array-partition pragma:cyclic#One element is put into each new smaller array before coming back to the first array to repeat the cycle until the array is fully partitioned.
block#Smaller arrays are formed from consecutive blocks of the original array.
complete#The original array is decomposed into individual elements, each of which is synthesized into a register.
The number of smaller arrays into which the original array is partitioned can be specified by the option
factor=for the cases oftype=cyclicandtype=block. See the figure below for illustrative examples of the three types of array partitioning: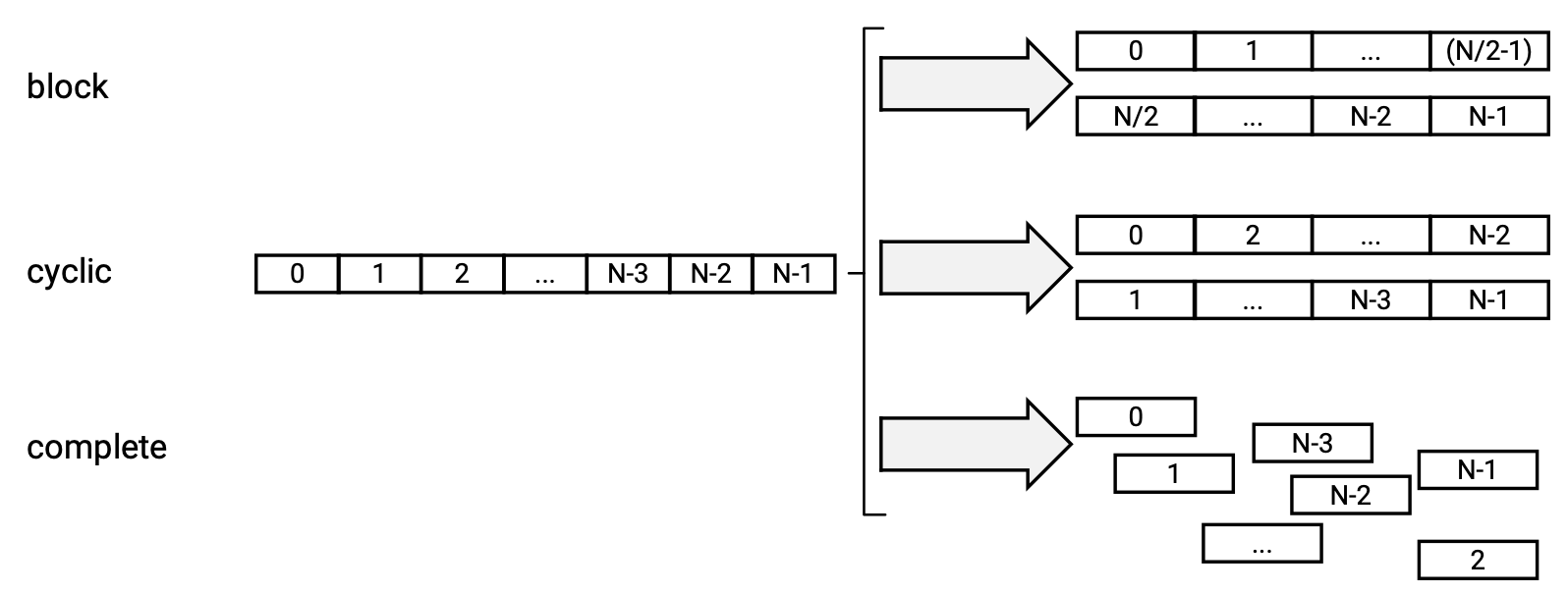
Fig. 4.1 Examples of the three different types of array partitioning where the option
factor=2is set for the cases oftype=blockandtype=cyclic(image taken from [AMD-Xilinx24c])#For a multi-dimensional array, the
dim=option can be used to specify the dimension for which the array should be partitioned. Settingdim=0partitions all dimensions.
Array partitioning clearly improves array access (and hence latency and throughput) in the expense of using more PL resources. For example, consider completely partitoning the array
xin the previous example:int acc = 0; int x[10]; #pragma HLS array_partition variable=x type=complete Loop: for (int n=0; n<10; n++) { #pragma HLS unroll acc += x[n]; }
Ten registers are synthesized for the 10 elements of
x. Reading from the 10 registers and accumulating through the adder tree generated form unrollingLoopcan all be done in parallel with a single clock cycle! The 10 registers with array partitioning and the two-port RAM without array partitioning are both implemented using CLB resources. Implementation of the former requires more resource.
4.3.1.2. Array Reshaping#
An array can be reshaped by using
#pragma HLS array_reshape.The same three types of array partitioning are also available for array reshaping with the elements of the original array placed in different sections of bits in an element of the reshaped array as illustrated by the examples shown in the following figure:
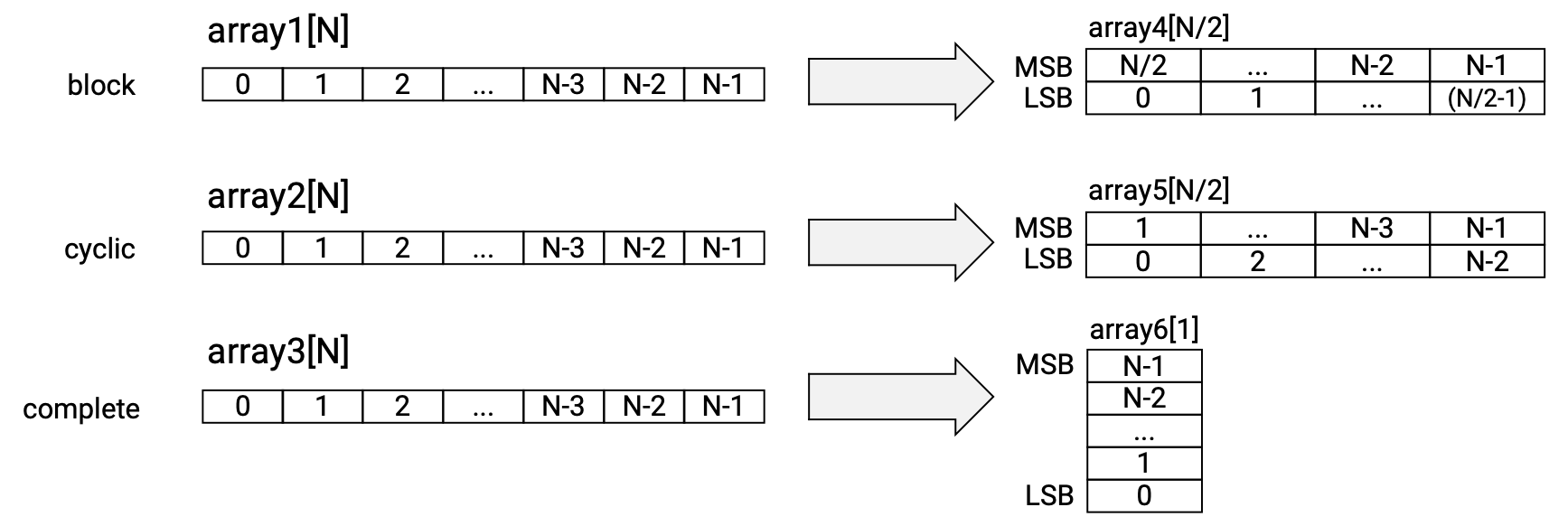
Fig. 4.2 Examples of the three different types of array reshaping where the option
factor=2is set for the cases oftype=blockandtype=cyclic(image taken from [AMD-Xilinx24c])#For a multi-dimensional array, the
dim=option can be used to specify the dimension for which the array should be reshaped. Settingdim=0reshapes all dimensions.
If block RAM is chosen to be the PL resource to implement an array, array reshaping can reduce the number of block RAM consumed compared to array partitioning. However, array reshaping may not be as beneficial when
type=completebecause the whole original array is read/or write as a single element and extra logic and registers are needed to access the individual sections of the element. For example, doingint acc = 0; int x[10]; #pragma HLS array_reshape variable=x type=complete Loop: for (int n=0; n<10; n++) { #pragma HLS unroll acc += x[n]; }
gives the same latency for the unrolled loop
Loopas array partitioning but requires more CLB resource to implement the reshaping.
4.3.2. Array Initialization and Reset#
The standard C++ convention dictates that the elements of an array declared within a local scope (e.g., within a function) are not initialized. This convention carries over to Vitis HLS.
If we want to initialize an array, we may use the standard C++ array initialization syntax to do so, e.g.,
int x[10] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9};
Tip
Initializing an array as in the example above requires clock cycles to write the array elements to memory. If the array
xis declared (and initialized) within a function and the function is called multiple times, then the extra clock cycles consumed on initializingxare needed for each call to the function.We may save those extra array initialization clock cycles by using the qualifier
staticto declare the array, e.g.,static int x[10] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9};
Vitis HLS interprets a
staticarray in the same way as in standard C++ that the values of the array elements are preserved across function calls. In this way, declaring a static array helps to better match the behavior of the C++ code with that of hardware memory that implements the array.An additional advantage of declaring a static array is that Vitis HLS can hard-code the initialization of its elements into the RTL design so that no extra write clock cycles are needed.
By default, Vitis HLS does not reset static arrays when a hardware reset signal is asserted during execution (it does so for a power-on reset though). This is done to avoid adding extra reset logic for the implementation of the static arrays and the extra initialization clock cycles needed. We can overide this default configuration on a per array basis by using
#pragma HLS reset.