7.8. Polyphase Implementation of \(\frac{U}{D}\)-rate Filter#
Consider the general \(\frac{U}{D}\)-rate system as shown below with an LTI filter

whose impulse response is \(h[n] \stackrel{z}{\longleftrightarrow} H(z)\):
As in Section 7.7, applying the transposed form of the polyphase decomposition identity to \(H(z)\) with \(e_k[n] = h[nU+k]\), for \(k=0,1,\ldots, U-1\), and then the upsampling identity to each branch gives
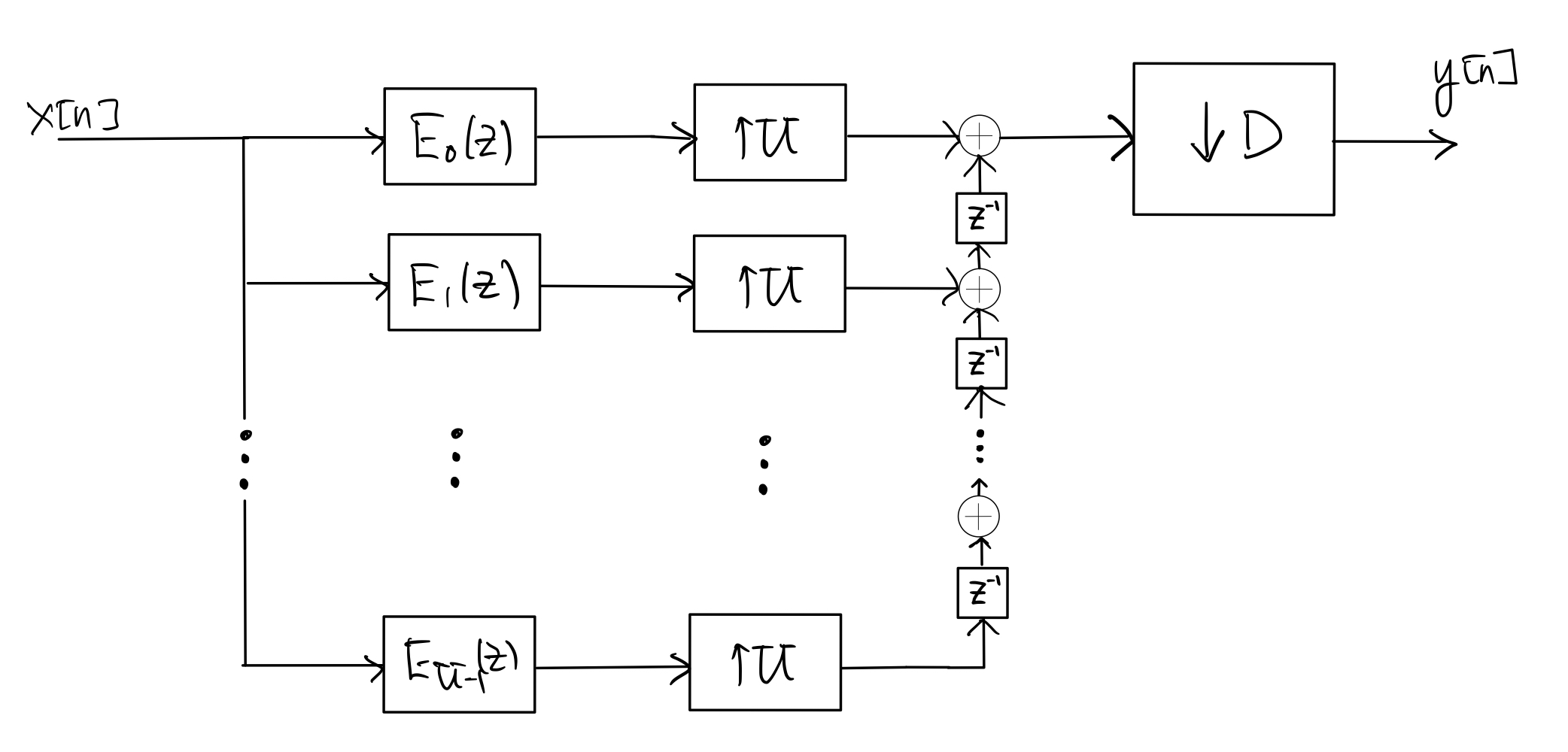
Next, applying the upsample-downsample-mux identity to the bank of upsamplers and the downsampler in step 1 gives
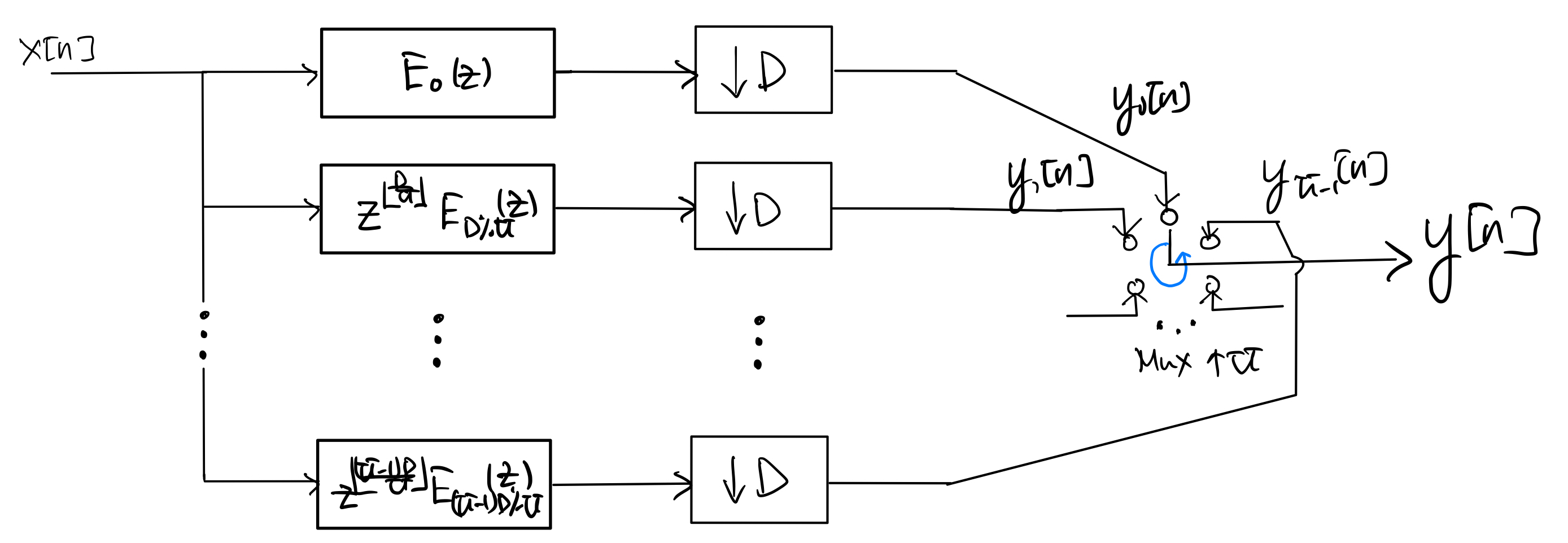
Then, for each \(k=0,1,\ldots, U-1\), , as in Section 7.6, applying the direct form of the polyphase decomposition identity, downsampling identity, and downsample-demux identity to the \(k\)th branch in step 2 gives
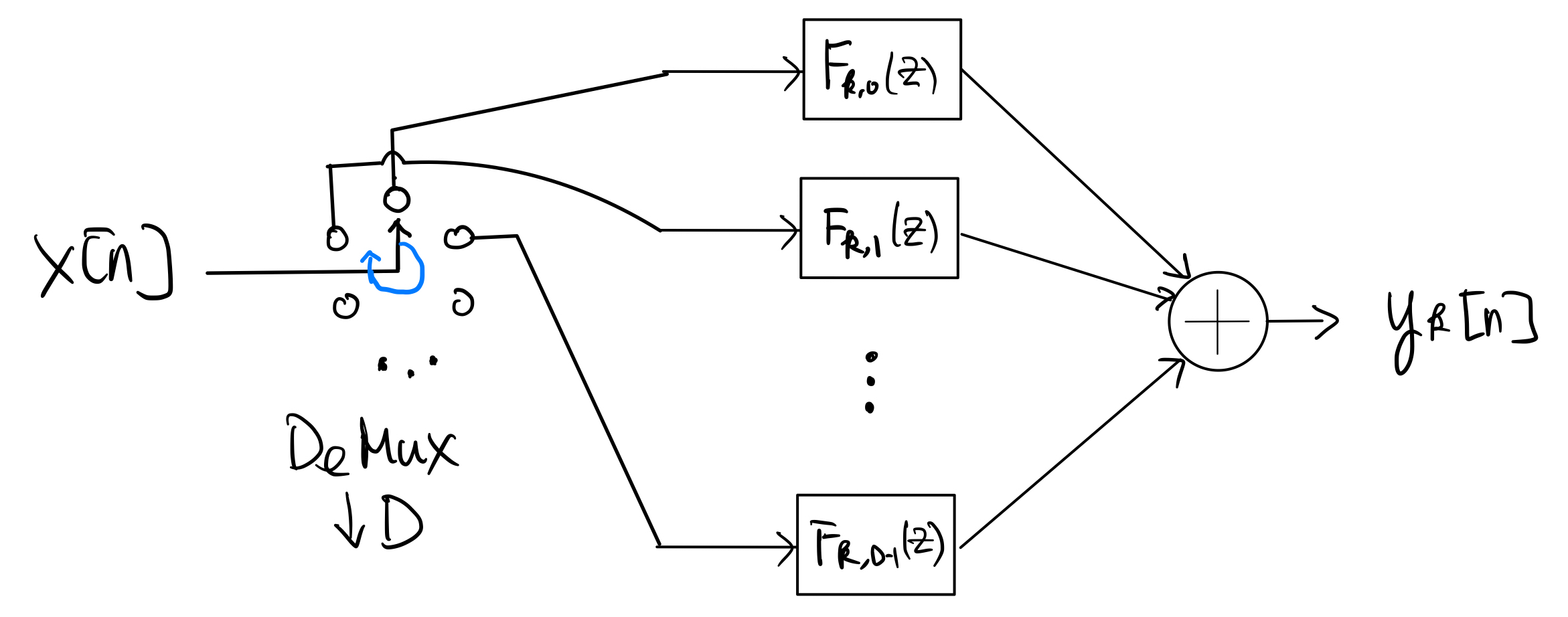
where the impulse response of the polyphase filter component \(F_{k,l}\) is given by
\[\begin{align*} f_{k,l}[n] &= e_{kD\%U} \left[nD + \left\lfloor \frac{kD}{U} \right\rfloor + l \right] \\ &= h \left[ \left(nD + \left\lfloor \frac{kD}{U} \right\rfloor + l \right) U + kD\%U \right] \\ &= h[nUD + kD + lU] \end{align*}\]for \(l=0,1,\ldots, D-1\).
Caution
Note that some of the polyphase filter components \(f_{l,k}[n]\) may be non-causal even if \(h[n]\) is causal.
Finally, putting the polyphase implementation of the \(k\)th branch in step 3 back to the structure in step 2 gives the following overall polyphase implementation of the \(\frac{U}{D}\)-rate filter:
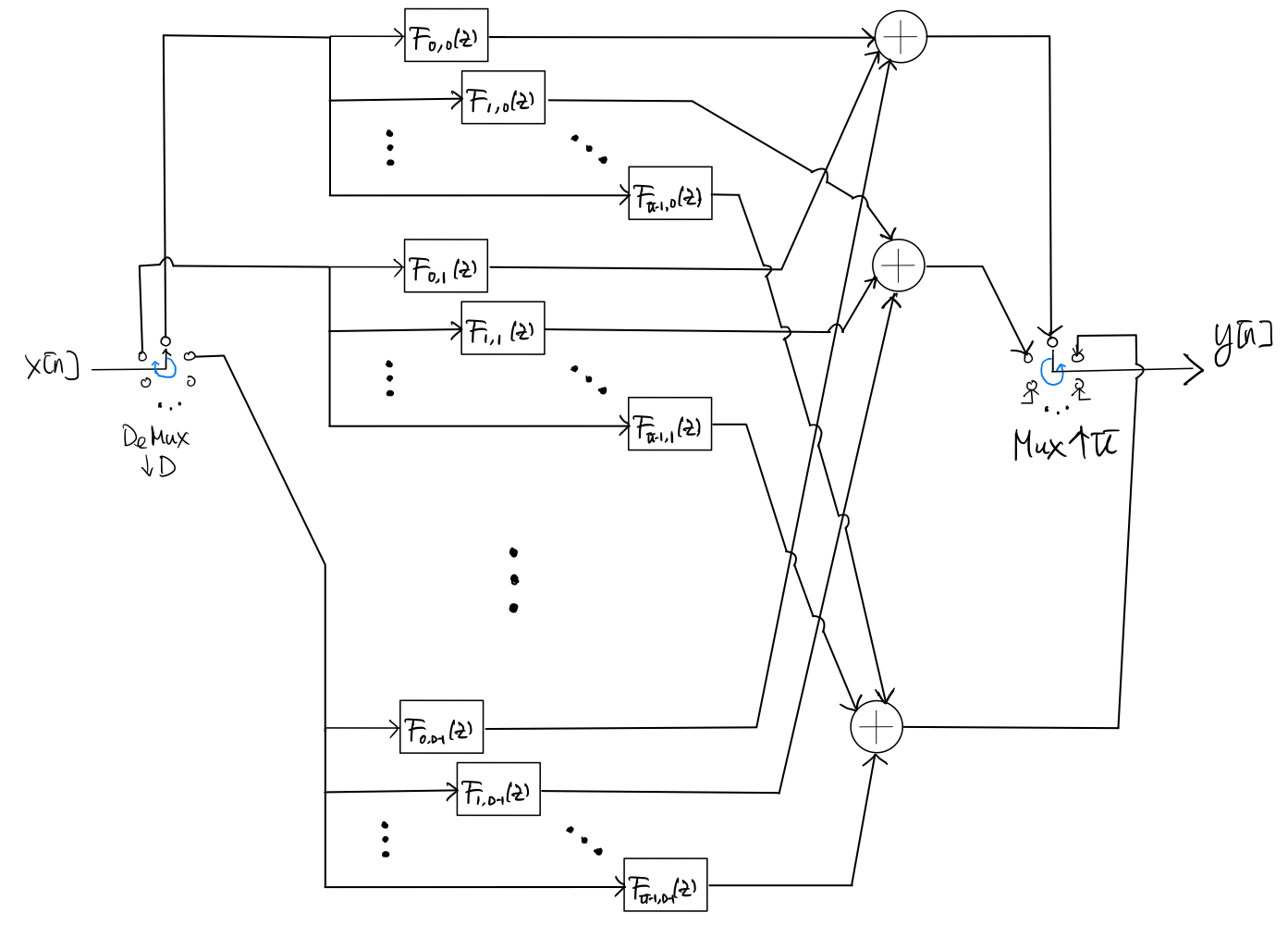
Note that all the polyphase component filters \(F_{k,l}(z)\), \(k=0,1,\ldots, U-1\) and \(l=0,1,\ldots, D-1\), operate at \(\frac{1}{D}\) times of the input rate. If \(H(z)\) is an FIR filter of length \(L\), then the length of \(f_{k,l}[n]\) is at most \(\lceil \frac{L}{UD} \rceil + 1\).
Clearly, the polyphase structure allows simple parallel implementation of the polyphase componet filters. Assuming \(NU \gg L \gg UD\) where \(N\) is the length of the input signal, the computational complexity (number of multiplications) of the polyphase implementation is \(\mathcal{O}(\frac{L}{D})\) per input sample, instead of \(\mathcal{O}(\frac{UL}{D})\) per input sample for the direct implementation.
The MATLAB function
upfirdnconsidered in the MATLAB example in Section 7.4 implements the polyphase structure in step 4 above.