7.4. Multi-rate Filtering#
A multi-rate filter is one whose input and output rates differ. That is, the filter outputs more/fewer than one sample per each input sample.
In practice, a fixed-rate ADC (and/or DAC) is often used. We may want to process the sampled signal at a rate different from the sampling rate of the ADC. In such cases, performing rate conversion in discrete time using a multi-rate filter would be convenient.
A general \(\frac{U}{D}\)-rate filter can be obtained by replacing the ideal lowpass filter in the rate conversion system in Section 7.3 with a general lowpass filter \(h[n]\) operating at the interpolated rate \(U\):
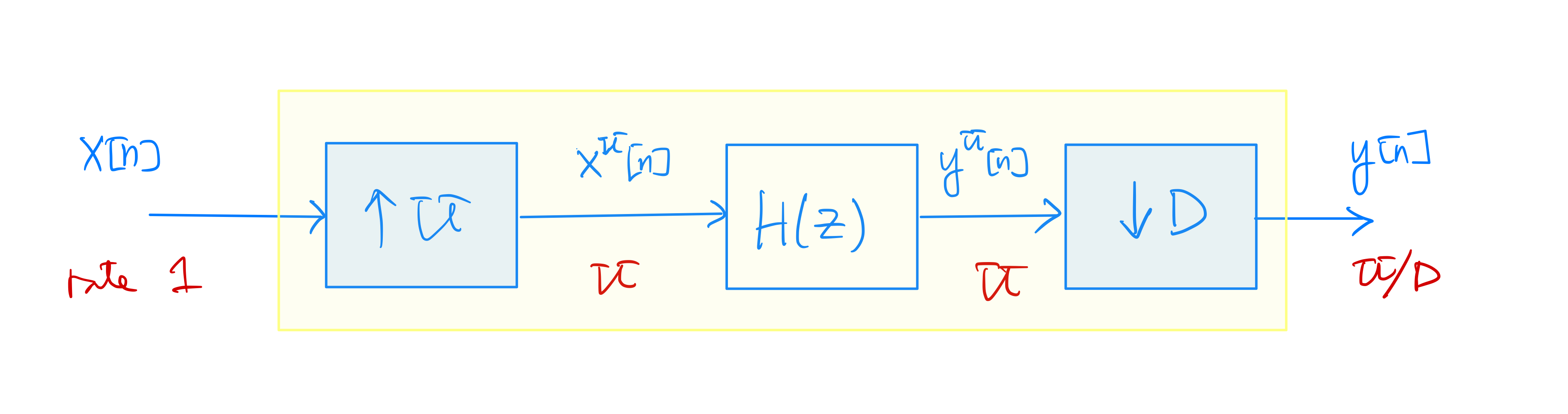
Clearly, if \(X(e^{j\hat\omega}) \neq 0\) for \(\frac{U\pi}{D} \leq |\hat\omega| \leq \pi\), we must have \(H(e^{j\hat\omega}) = 0\) for \(\frac{\pi}{\max(U,D)} \leq |\hat\omega| \leq \pi\) for interpolation and anti-aliasing.
Direct implementation of the multi-rate filter above may not be desirable in practice because the filter \(h[n]\) needs to be implemented at \(U\) times the input rate.
For the case that \(h[n]\) is an FIR filter of length \(L\), a direct time-domain implementation (convolution) of the \(\frac{U}{D}\)-rate filter requires \(\displaystyle \left\lfloor \frac{NU+L-1}{D} \right\rfloor L\) multiplications when the length of the input signal is \(N\). Assuming \(NU \gg L \gg UD\), the number of multiplications needed to implement the \(\frac{U}{D}\)-rate is thus \(\mathcal{O}(\frac{UL}{D})\) per input sample.
One may reduce the computational complexity of implementing the \(\frac{U}{D}\)-rate filter by performing frequency-domain filter using FFT based on the overlap-save or overlap-add algorithm discussed in Section 5.4.
MATLAB Example:
In this example, we design and implement a \(\frac{3}{2}\)-rate FIR filter to convert a chirp signal that is sampled at \(500\) samples per second to one that is sampled \(750\) samples per second. The chirp signal is specified by \(x(t) = \cos(800\pi t^2)\). First, generate the sampled version of the chirp at \(f_s=500\) for a duration of \(0.1\) seconds:
>> fs = 500; >> t = 0:1/fs:0.1; >> x = cos(800*pi*t.*t);
From Section 7.3, we need to design a lowpass FIR filter with cutoff at \(\frac{\pi}{3}\) and passband magnitude \(3\) to work as the interpolation filter. Here, we pick the specification \((\frac{\pi}{3}, 0.35\pi, 0.01, 0.01)\) and use the Parks-McClellan algorithm to obtain a generalized linear-phase FIR filter:
>> [M, we, A, W] = firpmord([1/3, 0.35], [3, 0], [0.01, 0.01]) M = 272 we = 0 0.3333 0.3500 1.0000 A = 3 3 0 0 W = 3 1 >> h = firpm(M, we, A, W); >> fvtool(h, 1);
With the interpolation filter designed, we can then use the MATLAB function
upfirdnto implement the rate conversion:>> y = upfirdn(x, h, 3, 2);
We may plot the original sampled signal
xand the rate-converted signalytogether on the same figure to see the equivalent effect of increasing the sampling rate to \(750\) samples per second:>> stem(((0:length(y)-1)*2-M/2)/3/fs, y, 'rx') >> hold on; >> stem((0:length(x)-1)/fs, x, 'bo'); >> tt = 0:1/fs/100:0.1; >> xx = cos(800*pi*tt.*tt); >> plot(tt, xx, 'k'); %plot continuous-time chirp
Caution
Recall that the generalized linear-phase filter has a group delay of \(\frac{M}{2} = 136\) samples at the interpolated rate. Thus, we need to left-shift the rate-converted signal
yin the figure to make it align with the original sampled signalxfor comparison.